Бесколлекторные моторы BLDC - 2
26.02.2021 16:02, автор DiEitch
В одной из прошлых статей, я кратко остановился на принципах работы бесколлекторных (вентильных) моторов и даже попробовал виртуально запустить такой мотор. Ранее я уже упоминал о специализированных микросхемах для запуска трёхфазных моторов не имеющих отдельных датчиков положения ротора (и основанных на обратной индукции обмоток статора - BEMF).
По просьбам читателей здесь расскажу, как правильно подключать микросхему TDA514x, и какие проблемы могут возникнуть при её использовании. Попутно отвечу на некоторые ЧаВо:
- почему мотор дёргается при запуске, но не стартует?
- почему при увеличении напряжения мотор останавливается?
- почему мотор можно легко затормозить пятым пальцем левой руки?
- почему греется микросхема?
- какой максимальный ток даёт на обмотки мотора микросхема?
- как влияет конденсатор 470мкФ по питанию микросхемы?
- как влияет конденсатор 220нФ на выводе 11?
- как подключать моторы с тремя выводами (без отвода от центра звезды)?
- можно ли умощнить выходные каскады микросхемы для подключения более мощных (с током от 2 до 10А) моторов?
- какая микросхема TDA514x лучше: Phillips или NXP?
- какое питающее напряжение можно подавать на микросхему?
- назначение выводов 13,14 и 15?
- назначение выводов 5 и 6?
- назначение вывода 2?
- как сменить направление вращения мотора?
Итак, для начала - рабочая схема подключения TDA514x для трёхвыводных моторов:
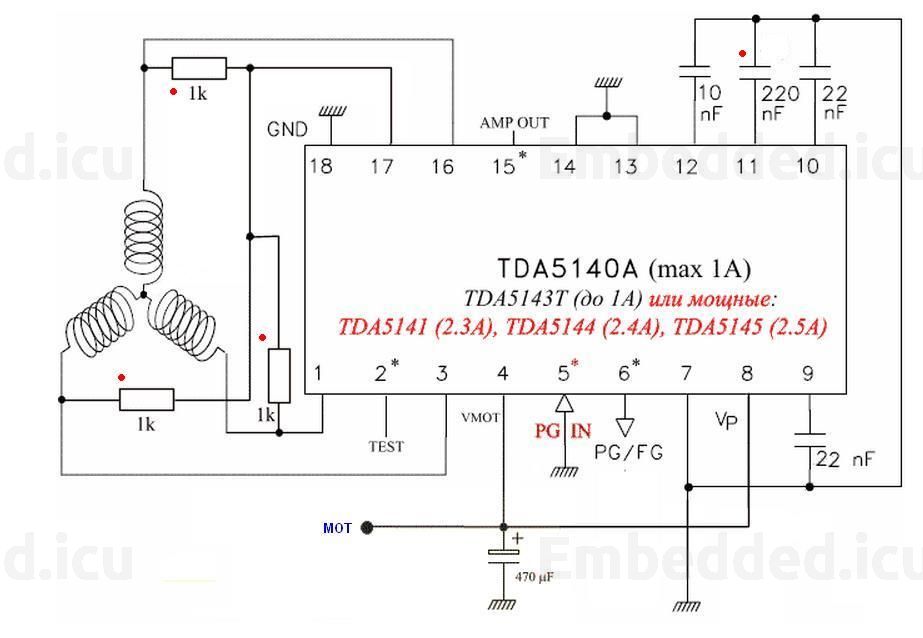
Особо внимательные читатели сразу заметят, что резисторы номиналом 1кОм создают необходимую среднюю точку. Когда подключаете четырёхвыводный мотор (который с нейтралью), их можно ставить, а можно и не ставить.
Конденсатор на 470мкФ необходим для устойчивой работы. Можно его ёмкость немного уменьшить, но при сильном уменьшении мотор может либо плохо стартовать, либо произвольно останавливаться (особенно при нагрузке). Иногда параллельно ему ставят диод Шоттки (обратной полярностью) для защиты цепей питания от обратной самоиндукции обмоток.
Выводы 2, 5 и 6 не используются для запуска моторов от HDD, при этом вывод 5 (PG IN - Amplifier for external position generator PG signal) надо соединить с корпусом (минусом), так как не используется внешний датчик положения ротора. Вывод 2 - технологический, он двунаправленный (вход/выход), обязательно оставьте его свободным. С вывода 6 можно снять информацию о скорости вращения мотора (открытый коллектор).
Выводы 4 и 8 в этой схеме соединить между собой (я не пробовал подсоединять вывод 8 к питанию 5V, но в интернете пишут, что так не работает или работает плохо).
Группа выводов 13, 14 и 15 относится к встроенному дифференциальному усилителю большого коэффициента усиления с выходным каскадом на транзисторе (открытый коллектор). Применяется для подключения индуктивных датчиков. Если не планируется его применение (а он может применяться для стабилизации скорости вращения мотора), для уменьшения энергопотребления и нагрева микросхемы надо соединить входы и подключить к корпусу (минусу). Вывод 15 в данной схеме следует оставить свободным.
Если мотор дёргается при запуске:
- не хватает ёмкости конденсатора (470мкФ), который подключен по питанию микросхемы;
- закорочена или не подсоединена одна/несколько обмоток;
- конденсатор на 200-270нФ не подключен к ножке 11.
Если микросхема греется:
- напряжение питания выше 16 Вольт (ограничение для вывода VMOT);
- закорочены обмотки мотора (при этом мотор не стартует);
- выходы, которые должны быть свободными, подключены к корпусу либо питанию;
- выводы 13 и 14 не подключены к корпусу (немного греется).
Мотор можно легко затормозить если:
- источник питания не даёт достаточный ток и переходит в защиту;
- не хватает ёмкости конденсатора (470мкФ), который подключен по питанию микросхемы.
На рисунке внутри блока микросхемы подписаны варианты микросхемы TDA514x, которые отличаются только максимальным выходным током.
Конденсатор на 200-270нФ, подключенный к выводу 11, отвечает за генератор перезапуска с частотой ~3Гц, при его отсутствии невозможен запуск/перезапуск мотора.
Если есть такая возможность, лучше брать микросхему с логотипом NXP, она новее и должна работать лучше.
Умощнение выходных каскадов для этой микросхемы произвести очень тяжело (да и стоит ли, если можно "взять" старшего брата в линейке), т.к. выводы компараторов BEMF соединены с выводами обмоток внутри чипа. Дополнительные схемы окажутся слишком громоздкими и не окупят своего применения (нужно будет добавить 3 инвертора, с обмоток двигателя сигналы BEMF через синхронизаторы снова подать на выводы микросхемы в моменты чтения).
Микросхема хорошо работает в диапазоне питающих напряжений от 4 до 16 вольт (для обеспечения требуемой мощности "на валу" для моторов от HDD, питающее напряжение должно быть чуть выше 12 Вольт).
И напоследок: если вас не устраивает направление вращения мотора с тремя проводами, просто поменяйте два (из трёх) провода (фазы) между собой. Для четырёхвыводного сделайте то же самое, но не трогайте среднюю точку обмоток (нейтраль). Для регулировки скорости вращения мотора в этой схеме необходимо регулировать напряжение питания. Замечено, что при резком изменении напряжения питания мотор может остановиться, поэтому следует использовать плавную регулировку, либо увеличить ёмкость конденсатора по питанию до 1000мкФ (не забывайте правильно выбирать рабочее напряжение электролитических конденсаторов, иначе можно их испортить).
Всем удачи в запуске моторчиков от HDD и не только!