Эксперименты с китайским шаговым двигателем
17.09.2014 18:41, автор SergSXM
Для одной поделки с китайского сайта мною были заказаны два шаговых двигателя 28BYJ-48. В первую очередь они привлекли меня малой стоимостью. После приезда из Китая они, как водится, полежали пару месяцев на полке, и вот наконец-то дело дошло до их проверки.
Технические характеристики двигателя 28BYJ-48 по данным производителя:
|
Параметр |
Ед. изм. |
Значение |
|
Напряжение питания |
В |
5 |
|
Сопротивление обмоток (при 25⁰С) |
Ом |
60 |
|
Максимальная частота схватывания без нагрузки |
PPS (Pulse per second) |
≥ 500 |
|
Максимальная частота выхода из схватывания без нагрузки |
PPS (Pulse per second) |
≥ 900 |
|
Момент усилия на валу |
мН*м |
≥ 29.4 |
|
Рабочая частота |
PPS (Pulse per second) |
100 |
|
Шум |
дБ |
≤ 35 |
Угол одного шага – 5,625 градусов. Учитывая встроенный редуктор, уменьшающий частоту вращения в 64 раза, на один оборот двигателя приходится 4096 шагов.
Для управления двигателем была собрана простая испытательная схема на микроконтроллере AtMega8:
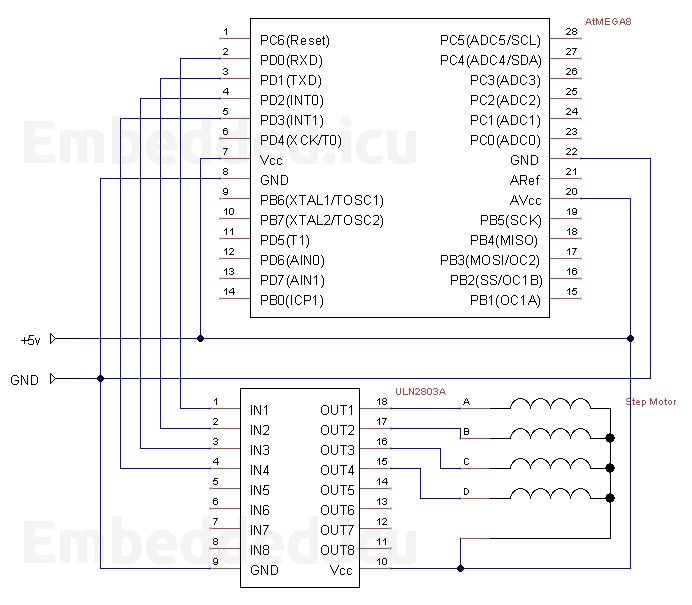
Опытным путём было установлено, что на разъёме двигателя красный провод – общий. Остальные провода идут по порядку фаз.
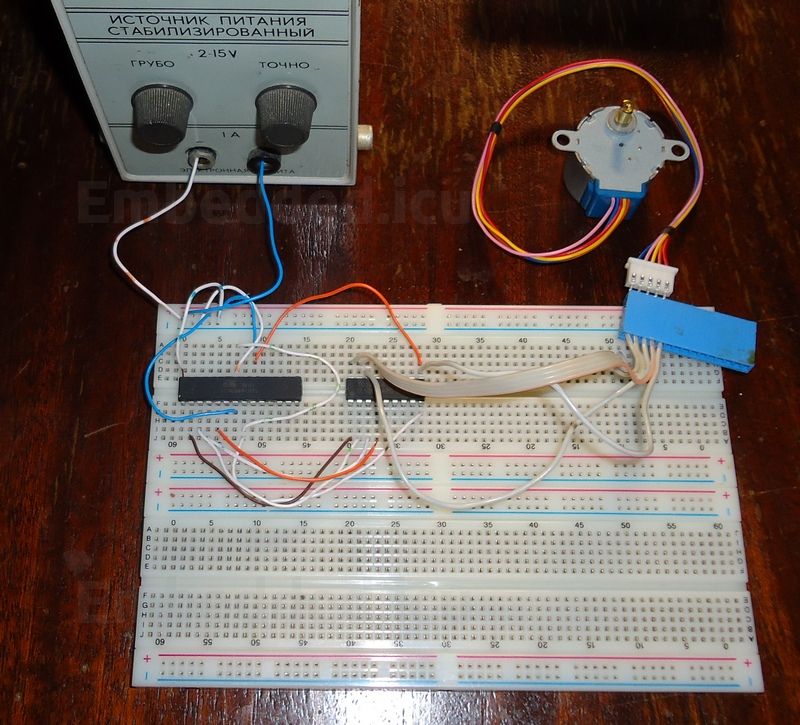
Внешний вид собранной схемы:
Код прошивки микроконтроллера:
/*****************************************************
Chip type : ATmega8
Program type : Application
AVR Core Clock frequency: 8,000000 MHz
Memory model : Small
External RAM size : 0
Data Stack size : 256
*****************************************************/
#include <mega8.h>
unsigned int counter = 0;
// Timer1 overflow interrupt service routine
interrupt [TIM1_OVF] void timer1_ovf_isr(void)
{
TCNT1H=0xFFE0 >> 8;
TCNT1L=0xFFE0 & 0xff;
counter++;
/*
// Полушаговый режим
if (counter > 7) counter = 0;
if (counter == 0) PORTD = 0x01;
if (counter == 1) PORTD = 0x03;
if (counter == 2) PORTD = 0x02;
if (counter == 3) PORTD = 0x06;
if (counter == 4) PORTD = 0x04;
if (counter == 5) PORTD = 0x0C;
if (counter == 6) PORTD = 0x08;
if (counter == 7) PORTD = 0x09;
*/
/*
// Шаговый режим
if (counter > 3) counter = 0;
if (counter == 0) PORTD = 0x01;
if (counter == 1) PORTD = 0x02;
if (counter == 2) PORTD = 0x04;
if (counter == 3) PORTD = 0x08;
*/
// Инверсный шаговый режим
if (counter > 3) counter = 0;
if (counter == 0) PORTD = 0x0E;
if (counter == 1) PORTD = 0x0D;
if (counter == 2) PORTD = 0x0B;
if (counter == 3) PORTD = 0x07;
}
void main(void)
{
// Input/Output Ports initialization
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTB=0x00;
DDRB=0x00;
// Port C initialization
// Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTC=0x20;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=Out Func2=Out Func1=Out Func0=Out
// State7=T State6=T State5=T State4=T State3=0 State2=0 State1=0 State0=0
PORTD=0x00;
DDRD=0x0F;
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: Timer 0 Stopped
TCCR0=0x00;
TCNT0=0xFC;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: 7,813 kHz
// Mode: Normal top=0xFFFF
// OC1A output: Discon.
// OC1B output: Discon.
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer1 Overflow Interrupt: On
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
TCCR1A=0x00;
TCCR1B=0x05;
TCNT1H=0xFC;
TCNT1L=0x18;
ICR1H=0x00;
ICR1L=0x00;
OCR1AH=0x00;
OCR1AL=0x00;
OCR1BH=0x00;
OCR1BL=0x00;
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer2 Stopped
// Mode: Normal top=0xFF
// OC2 output: Disconnected
ASSR=0x00;
TCCR2=0x00;
TCNT2=0x00;
OCR2=0x00;
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
MCUCR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x04;
// USART initialization
// USART disabled
UCSRB=0x00;
// Analog Comparator initialization
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80;
SFIOR=0x00;
// ADC initialization
// ADC disabled
ADCSRA=0x00;
// SPI initialization
// SPI disabled
SPCR=0x00;
// TWI initialization
// TWI disabled
TWCR=0x00;
// Global enable interrupts
#asm("sei")
while (1)
{
}
}
Были протестированы три режима работы: шаговый, инверсный шаговый и полушаговый режимы. В ходе экспериментов было выяснено, что двигатель стабильно стартует во всех режимах при скорости 244 PPS (приблизительно 3,5 оборота в минуту). При работе двигателя скорость удавалось поднять до 372 PPS, после этого двигатель часто останавливался.
В целом впечатление от двигателя положительное, его с успехом можно применять в тихоходной механике, не требующей очень больших усилий.